
Gecko-inspired robot designed to clean space
Not only do we litter the earth, our litter goes beyond the planet. The vacuum of space around Earth is not as clean and empty as you may think. There is around 500,000 pieces of human-made debris orbit our planet every second, reaching speeds of up to 17,500mph.
This debris is a threat to satellites, space vehicles like the ISS and astronauts – and the problem is only likely to worsen as we continue to explore our galactic neighbourhood. Yet clearing this space junk is one the most difficult challenges facing astrophysicists.
Now, with inspiration from an incredible lizard, a robot has been designed to tackle this very problem.
It might seem simple, but clearing up space debris is a difficult task. Space is already a vacuum, so suction techniques don’t work; it is hard to produce a sticky substance that can survive through huge temperature swings; and magnets only work on magnetic materials.
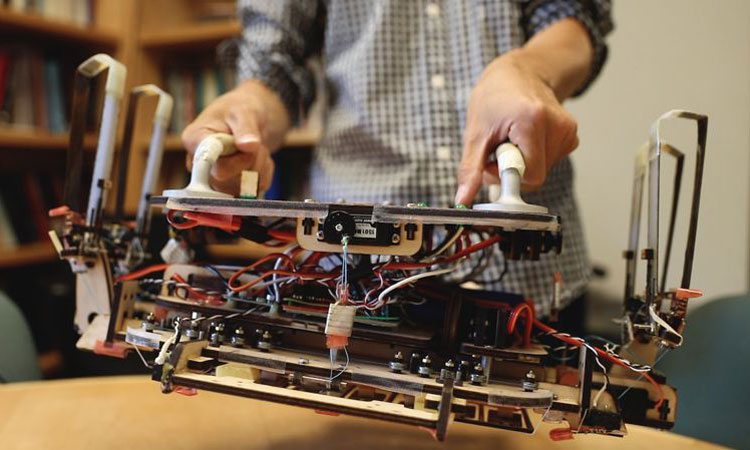
This is where the new robot, designed by researchers from Stanford University and NASA’s Jet Propulsion Laboratory (JPL), comes in.
“What we’ve developed is a gripper that uses gecko-inspired adhesives,” said Mark Cutkosky, professor of mechanical engineering and senior author of a paper describing the robot.
His research started ten years ago, when the team started looking into climbing robots using adhesives inspired by how geckos stick to walls.
Gecko feet are incredibly strong. They climb walls using microscopic ‘flaps’ that, when in full contact with a surface, create what’s known as a Van der Waals force between the feet and the surface. This force is the same kind of electrostatic attraction between certain elements and molecules.
The gripper on Cutkosky’s robot has much larger flaps (about 40µm compared to 200nm) but the rest of the design is much the same. It works using very gentle pushes in the right direction.
“If I came in and tried to push a pressure-sensitive adhesive onto a floating object, it would drift away,” said Elliot Hawkes, co-author of the paper. “Instead, I can touch the adhesive pads very gently to a floating object, squeeze the pads toward each other so that they’re locked and then I’m able to move the object around.”
The robot has been tested in the lab and in a zero-gravity environment in Nasa’s JPL. There, the team used two robots – one with small arms and another placed onto the floor, which acted like a giant air hockey table.
“We had one robot chase the other, catch it and then pull it back toward where we wanted it to go,” said Hawkes. “I think that was definitely an eye-opener, to see how a relatively small patch of our adhesive could pull around a 300kg robot.”
The prototype will now be reproduced with sturdier materials and tested at the International Space Station. This will make sure it can withstand the kind of temperature changes and other challenges facing the robots trying to clean up space.
The paper has been published in the journal Science Robotics.
Comments are closed, but trackbacks and pingbacks are open.