
Handy 3D-printed devices from MIT
Although these names seem fitting for superhero characters; Cyborg beast, phoenix, talon — they are actually names for devices that make people feel like superheroes. These devices are 3D-printed hands that are designed for people who live without all or part of their arms.
The hands are featured on a growing network called e-NABLE, which is an online forum to promote collaboration between hand-design developers, to pair developers with those in need of hands, and to grant widespread access to technologies. The e-NABLE website allows users to upload or download hand designs that include a materials list, dimensions for each part, and assembly instructions. Anyone with access to a 3D printer can fabricate and assemble e-NABLE hands for as little as $50, which is a significant savings over traditional prosthetics that can cost thousands of dollars.
At MIT Lincoln Laboratory’s Technology Office Innovation Laboratory (TOIL), researchers are working to enhance the technology of current 3D-printed hands by improving the mechanics of finger motion, adding nonelectronic temperature and tactile feedback, and incorporating motorized technologies. The teams hope that their robust designs reach beyond the e-NABLE community to other relevant organisations, such as the Wounded Warrior Project, a nonprofit organisation that provides injured military service members with medical and lifestyle support. “There are many people who could benefit from these devices,” says TOIL Manager David Scott, “so we are using Lincoln Laboratory brainpower to improve the existing models.”
While the process of building a hand is simple enough that children can participate, the process of designing a hand is much more complex. Led by Scott, researchers Naomi Hachen, Luke Johnson, Keri Mroszczyk, and Samuel VanNoy began their mission to improve upon the existing hands by downloading the current designs and building them in TOIL. The pieces of each hand (e.g., the fingertips and palm) and connective pieces (e.g, the hinge pins and tensioner block) are typically printed with polylactic acid (PLA) plastic, which is a biodegradable thermoplastic that becomes pliable when heated and solid when cooled. Once the pieces are printed, they are assembled according to the design instructions. The fingers are connected to a tensioner block positioned on the back of the wrist via strings that are woven through preprinted holes in the plastic and tied to individual pins. The tensioner block anchors the strings. When users bend their wrists, the elastic strings stretch to create tension that bends the fingers at their joints, forming a grip. When users straighten their wrists, the tension releases, causing the fingers to relax.
Although the hands have provided thousands of users with assistive capabilities, the available designs have limitations. For example, each finger is strung and mounted to one tension box, and the fingers move in unison when users flex their wrists. However, when just one finger is obstructed, all fingers become immobile, limiting grip capabilities. Lack of a strong grip can cause a myriad of issues, from preventing children from picking up cups to preventing adults from shaking hands. To address this mobility problem, the team searched for designs that would allow the fingers to close independently so that when one finger comes into contact with an obstacle, the other fingers would continue to move and form a grip. A mechanism known as the whippletree, commonly used in modern agriculture plows, vehicle windshield wipers, and telescopes, may provide a solution. The whippletree structure uses a central joint, or an equalizer, that is connected to linkages. If one link is obstructed — for example, by the edge of a handle — or pulls harder than other links, the central joint pivots to distribute force evenly through each linkage. By implementing the whippletree structure in a hand, tension is redistributed if one finger hits an obstruction, and the other fingers continue to move individually to form a grip. Currently, one design from e-NABLE has a whippletree joint that is used by four fingers. However, the thumb is still connected directly to the tensioner box, so if the thumb is obstructed, the remaining fingers cannot move. To resolve the thumb obstruction, the Lincoln Laboratory team created a whippletree structure that includes pivoting pins for all five fingers, allowing them to move independently.
In addition to improving range of motion, the team is adding passive temperature feedback and tactile feedback to the design. “It’s important for users to know whether or not a surface is hot,” says VanNoy. “If the users detect heat, they can potentially prevent personal injury and hand damage, such as melting.” To achieve temperature detection, the researchers add a colour-changing filament to the plastic that is used to print each hand. The thermochromic filament immediately changes colors (e.g., from blue to white) when heat is applied to its surface. Therefore, if a hand changes colors, the user knows that the hand is contacting a hot surface.
The researchers are also developing a tactile feedback component that they call the “icing on the cake.” Still in the design phase, the component would allow users to feel pressure. The design involves adding to the hand flexible tubing that runs from a fingertip to the forearm. Each end of the tubing will include small pockets — one set of pockets will rest on the underside of the 3D-printed fingertip, and another set will rest on the user’s arm. The tubing will be filled with a liquid (the researchers will investigate fluids of different viscosities, such as glycerol, oils, and water). When pressure is applied to the pockets on the fingertip, the fluid will move to the pockets resting on the user’s forearm, and she will be able to feel the extra fluid pressing against her skin. “When users grasp an object, they will actually be able to feel how hard they are squeezing with their 3D-printed hands,” says Hachen.
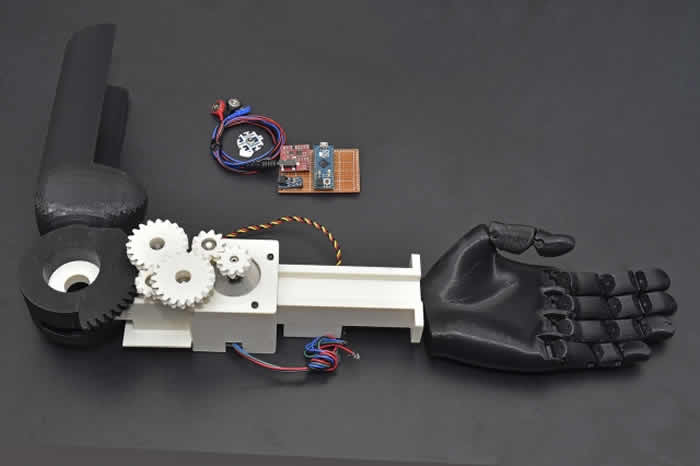
While Hachen, Mroszczyk, and VanNoy work to improve existing e-NABLE designs, Johnson is also working on more robust designs that include motorized parts. “We are particularly focused on helping Wounded Warrior Project members who would benefit from a strong, mechanical prosthetic,” says Scott. “Our design can be scaled for those without a wrist to those without an entire arm.” Johnson designed an entire 3D-printed arm that mimics elbow and hand movement, with the use of 3D-printed gears, motors, and an Arduino, or motherboard. A user can control the arm by attaching muscle sensors, connected to the Arduino, to her muscles. When the user flexes her muscle, the sensor sends a signal to the Arduino, which signals the motors to move the elbow or form a grip with the attached hand. Each muscle sensor is connected to an input pin on the Arduino, which then signals the motor to operate accordingly. “Different sensors can be programmed to different muscles,” says Johnson. “For example, if the user flexes her chest muscle, that movement could signal the motor to bend the elbow. If the user flexes her back, the hand could form a grip.” The motorized arms are compatible with any e-NABLE hand design and cost about $350 to build. While the motor can handle lifting 25 pounds, the researchers are testing the plastic used in printing the arms to determine its ability to withstand weights.
The researchers plan to continue developing and testing their hands within the next several months. When the designs are complete, they will be distributed to e-NABLE and the Wounded Warrior Project so that each technology will be readily available to those in need. “When I saw the existing e-NABLE hands, I knew that they could be better,” says Johnson. “Since starting this project, I have gained an array of knowledge from circuitry to engineering. But the most important part of this project is helping people. That knowledge is heartwarming.”
Comments are closed, but trackbacks and pingbacks are open.