
The first robot built of soft, deployable materials is capable of moving itself without the use of motors or any additional mechanical components.
The robot ‘walks’ when an electric current is applied to shape-memory alloy wires embedded in its frame: the current heats the wires, causing the robot’s flexible segments to contract and bend. Sequentially controlling the current to various segments in different ways results in different walking gaits.
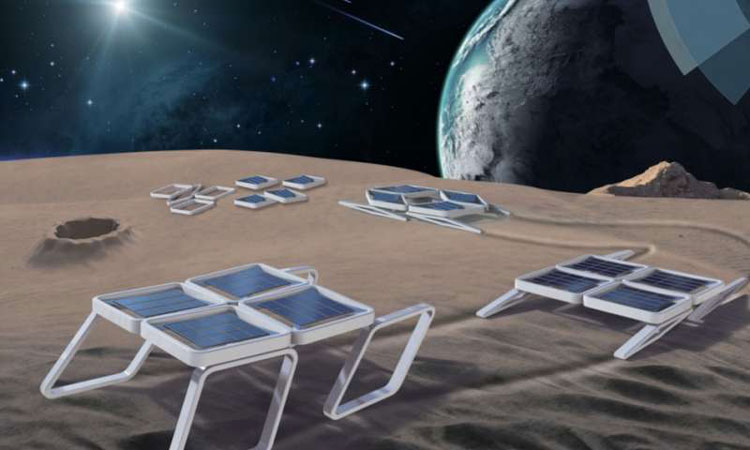
The researchers expect that the robot’s ability to be easily deployed, along with its low mass, low cost, load-bearing ability, compact size, and ability to be reconfigured into different forms may make it useful for applications such as space missions, seabed exploration, and household objects.
The scientists, Wei Wang et al., at Seoul National University and Sungkyunkwan University, have published a paper on the new robot and other types of deployable structures that can be built using the same method in a recent issue of Materials Horizons.
“The main advantage of this modular robot is robustness in various environments due to lack of mechanical systems such as motors and gears,” co-author Sung-Hoon Ahn at Seoul National University said. “Thus, problems facing motor-based robots, such as sealing and lubrication of mechanical systems in water or space environments, are not a problem for the smart actuator.”
The robot, which the researchers call DeployBot, is assembled from eight modules: four for the body and one for each of the four legs. In their folded state, the modules lie flat, and after they are deployed they pop up into roughly a square shape. The modules are made of both rigid and flexible materials and contain embedded magnets that connect and lock multiple modules together. A shape memory alloy wire running through the square frame of each module is responsible for deploying and folding the modules, which takes several seconds but can be done repeatedly.
The researchers demonstrated that the DeployBot can walk with two different gaits. The first is an undulating gait, which is similar to the way an inchworm creeps across a surface. To do this, a four-step sequence of current is applied to generate an actuation wave through the robot’s body, from front to back. The imbalance in frictional contact with the ground between the front and back legs causes the robot to pull up its back legs while holding its front legs in place, resulting in forward motion.
The DeployBot can also walk with an ambulating gait, similar to the way a four-legged animal walks. However, this gait requires the robot to support its entire weight on only two legs, and the robot’s legs do not have enough lifting force to do this – at least, not on land. But by placing the robot under water, on the sandy surface of a water tank, the researchers took advantage of Archimedes’ principle which reduces the force required to lift the robot.
Currently the robot moves very slowly, at a speed of a little over 2m/h. The robot can also turn, but again at a slow rate, requiring 21 strides to turn 90°. Although the robot is not fast, it could still serve as a useful tool for applications where speed is not important.
Going forward, the researchers expect that the techniques used here could also be used to make modules of different shapes, leading to a wider variety of robot designs and functions. The researchers also noted that different methods of moving the robot besides an applied current could be investigated, for example, using pneumatic actuation, magnetic fields, or optical forces. They also suggest that the same approach used here could be used to fabricate microscale and nanoscale structures, which would open up a new range of applications.
Comments are closed, but trackbacks and pingbacks are open.