

Engineers from the University of Illinois just released the first known study documenting the long-jumping motion of 3D-printed insect-scale robots. Published in the journal Smart Materials and Structures, the team previously documented the same lab’s investigation of vertical jumping in insect-scale robots. The Kinetic Materials Research Group considers artificial muscles as part of its focus on bio-inspired materials manufacturing. They claim it’s the first time anyone has demonstrated long jumping in insect-scale robots.
Jump performance was previously hindered by small-scale manufacturing processes and the limited availability of materials and miniature actuators. Using coiled artificial muscle actuators and projection additive manufacturing, the team produced an elastomeric robot design inspired by a locust’s jumping mechanism.
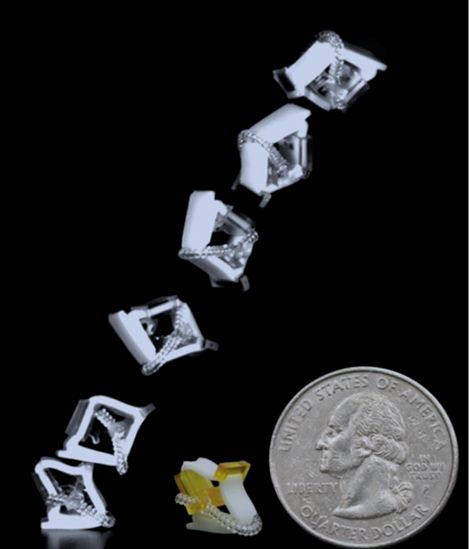
The goal of the research is to have the robot perform multiple jumps until they reach a target. A long-jumping insect-scale robot can be used in agricultural and maintenance applications, with future robots equipped with sensors to gather data from contacting a crop or exploring inside a machine. They can reach locations that drones cannot, and they are inexpensive.
Locusts inspired a four-bar linkage design for jumping. The study’s robot relies on one muscle serving a linkage system.
The insect-scale prototype features a lightweight elastomer body and an artificial muscle made from coiled, heat-treated nylon fishing line. The smallest robot has a mass of 0.216 grams and can jump 60 times its body size in horizontal distance.