
Since robots are afforded more and more capabilities these days, a team of researchers from Ecole Polytechnique Federale de Lausanne (EPFL) wanted to make sure they could handle common tasks delicately, not in their typical harsh and clunky manner.
EPFL scientists worked with the growing field of soft electronics, which are changing the way robots can touch, in order to develop a new soft robotic gripper made out of rubber and stretchable electrodes. The soft grippers can bend and pick up delicate objects like eggs and paper, without causing any damage.
The researchers owe their new development to electroadhesion, the electrostatic stickiness that occurs when you rub a balloon on your head.
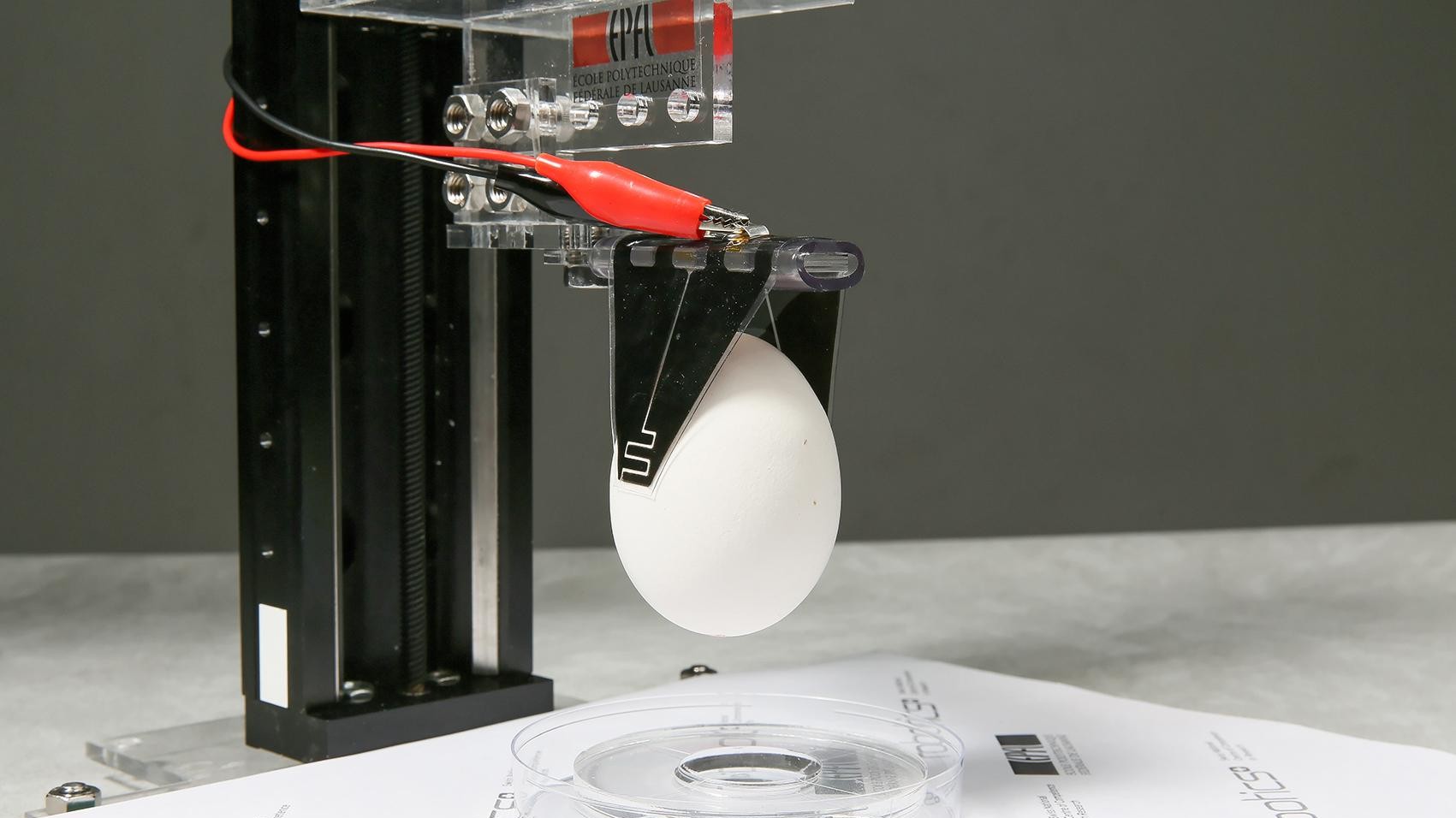
The new soft gripper uses electroadhesion, flexible electrode flaps that act like a thumb-index gripper to pick up fragile objects of arbitrary shape and stiffness, like an egg, a water balloon, or paper.
“This is the first time that electroadhesion and soft robotics have been combined together to grasp objects,” said Jun Shintake, doctoral student at EPFL and first author of the publication.
When the power is on, the electrodes bend towards the object to be picked up, imitating muscle function. The tip of the electrodes act like fingertips, so they can gently conform to the shape of the object, gripping onto it with electrostatic forces similar to the way a balloon sticks to the wall. These electrodes can carry 80 times their own weight and aren’t required to know anything about the object’s characteristics before picking it up.
While other groups have developed soft grippers in the past, they tend to be pneumatically controlled or incapable of picking up fragile objects without telling the gripper about the object’s shape beforehand.
“Our unique configuration of electrodes and silicone membranes is what allows us to control the bending of the flaps and the electrostatic grip,” said Herbert Shea, PhD co-supervisor of EPFL.
The electrode flaps are made up of five different layers: a pre-stretched elastomer layer sandwiched between two layers of electrodes, and two outer layers of silicone of different thickness. When the power is off, the flaps curl outward, and when the power is on, the attraction between the two layers of electrodes straightens out the membranes, which mimics art of muscle flexing. The tips of the flaps create an electrostatic field that causes electroadhesion and pick up the objects ever so gently.
Potential applications for the lightweight gripper include food industry jobs, capturing debris in outer space, or use in prostheses.
Story via EPFL.
Comments are closed, but trackbacks and pingbacks are open.